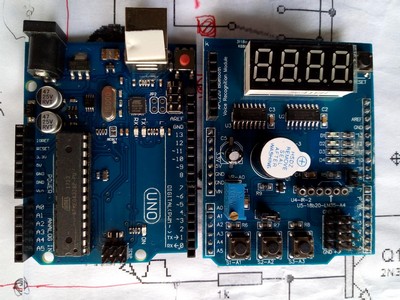
















 La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info...
La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info... Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Arduino
 ¿Quién soy yo? Mi nombre es Alberto y nací en el norte de Italia, donde vivo con mi esposa. Soy un desarrollador de software con una gran pasión por el hardware, y he pasado años jugando y haciendo cosas con Arduino ™.
¿Quién soy yo? Mi nombre es Alberto y nací en el norte de Italia, donde vivo con mi esposa. Soy un desarrollador de software con una gran pasión por el hardware, y he pasado años jugando y haciendo cosas con Arduino ™.
Cuando perdí mi trabajo como desarrollador de software, a fines de 2012, me decidí a tomar un descanso de todo lo que hice en los últimos 15 años, y he querido dedicar mi tiempo a algo que podría ser interesante para mí y útil para otros. Sigue leyendo
 Cuando queremos tomar las riendas de la programación de AVR en C una de las mejores parejas es “Eclipse IDE” mas “AVR-GCC” siendo estos dos libres y gratuitos, aunque claro esta que “AVR Studio” nos brinda un buen ecosistemas no siempre es el mejor sobretodo si no somos usuarios de win2.
Cuando queremos tomar las riendas de la programación de AVR en C una de las mejores parejas es “Eclipse IDE” mas “AVR-GCC” siendo estos dos libres y gratuitos, aunque claro esta que “AVR Studio” nos brinda un buen ecosistemas no siempre es el mejor sobretodo si no somos usuarios de win2.
En esta guía pretendo listar los pasos básicos para con figurar nuestro IDE. Sigue leyendo
 ArduLab es un entorno de trabajo que permite interactuar con una placa Arduino (Diecimila, Duemilanove o UNO) para conseguir crear un labaratorio virtual. Mediante ArduLab podemos realizar una serie de actividades y experimentos orientados principalmente al aprendizaje de conceptos sencillos relacionados con la tecnología (principalmente electrónica y robótica).
ArduLab es un entorno de trabajo que permite interactuar con una placa Arduino (Diecimila, Duemilanove o UNO) para conseguir crear un labaratorio virtual. Mediante ArduLab podemos realizar una serie de actividades y experimentos orientados principalmente al aprendizaje de conceptos sencillos relacionados con la tecnología (principalmente electrónica y robótica).
ArduLab no es un entorno de programación, es un Laboratorio Virtual de Experimentación que permite al usuario, aprender, probar y conocer como paso previo a la programació de sistemas, con sensores y actuadores, basados en Arduino. Sigue leyendo
 La conversión de un auto de RC en un robot es una manera rápida y fácil para empezar con la robótica. Por lo menos, cuando te aburres de jugar con tu coche de control remoto después de tres días, puedes convetirlo en un robot que hará todo lo que desees. Bueno, quizás no todo, pero por lo menos una cantidad considerable de movimientos.
La conversión de un auto de RC en un robot es una manera rápida y fácil para empezar con la robótica. Por lo menos, cuando te aburres de jugar con tu coche de control remoto después de tres días, puedes convetirlo en un robot que hará todo lo que desees. Bueno, quizás no todo, pero por lo menos una cantidad considerable de movimientos.
En esta explicación el autor expone lo mínimo necesario para empezar. Esto es un robot básico que se puede ampliar con sensores, código y hardware adicional para hacer algunas cosas realmente sorprendentes. Sigue leyendo
 PocketBot2 es un pequeño robot seguidor de linea. Está basado en su antecesor, el PocketBot Project. PocketBot2 tiene nuevas características importantes, aunque todavía mantiene todas las funciones y propiedades de la versión anterior del robot. Es decir, las reducidas dimensiones de 48 × 32 × 12 mm se conservan, por lo que el robot se adapta perfectamente en una caja de fósforos. Esta basado en un microcontrolador Atmel ATXmega128A3 y el programa está escrito en C. Una placa de circuito impreso doble faz hace las veces de chasis del robot. Tiene dos ruedas y dos puntos que sostienen la parte delantera y trasera. Se alimenta con una batería recargable de Li-Pol (3.7V, 190mAh). Posee un conector de 10 pines para conectar con la interfaz JTAG y UART para programar y depurar.
PocketBot2 es un pequeño robot seguidor de linea. Está basado en su antecesor, el PocketBot Project. PocketBot2 tiene nuevas características importantes, aunque todavía mantiene todas las funciones y propiedades de la versión anterior del robot. Es decir, las reducidas dimensiones de 48 × 32 × 12 mm se conservan, por lo que el robot se adapta perfectamente en una caja de fósforos. Esta basado en un microcontrolador Atmel ATXmega128A3 y el programa está escrito en C. Una placa de circuito impreso doble faz hace las veces de chasis del robot. Tiene dos ruedas y dos puntos que sostienen la parte delantera y trasera. Se alimenta con una batería recargable de Li-Pol (3.7V, 190mAh). Posee un conector de 10 pines para conectar con la interfaz JTAG y UART para programar y depurar.
Sigue leyendo
 Fritzing es una de una de las mejores herramientas que existen en la actualidad para el diseño y creación de circuitos electrónicos, y es tan potente y completo, que puede ser utilizado de manera profesional para crear todo tipo de circuitos.
Fritzing es una de una de las mejores herramientas que existen en la actualidad para el diseño y creación de circuitos electrónicos, y es tan potente y completo, que puede ser utilizado de manera profesional para crear todo tipo de circuitos.
Fritzing cuenta con características interesantes en cuanto al espacio de trabajo, pose una interfaz IDE, de esta manera se permite arrastrar y soltar los elementos en el área de trabajo. Fritzing cuenta con un área de trabajo, que es capaz de crear esquemas de circuitos muy detallados para la creación de los prototipos de nuestros proyectos en poco tiempo. Sigue leyendo
 El proposito de este ejemplo es mostrar el funcionamiento de 2 motores DC activandolos por PWM lo cual podemos hacer con cualquier microcontrolador. Para este ejemplo usaremos una Placa Romeo la cual utilizo por la comodidad de tener los perifericos mas utilizados en un robot para uso didáctico. Se podria combinar un puente H tipo L298 con una placa Arduino UNO, o utilizar cualquiera similar.
El proposito de este ejemplo es mostrar el funcionamiento de 2 motores DC activandolos por PWM lo cual podemos hacer con cualquier microcontrolador. Para este ejemplo usaremos una Placa Romeo la cual utilizo por la comodidad de tener los perifericos mas utilizados en un robot para uso didáctico. Se podria combinar un puente H tipo L298 con una placa Arduino UNO, o utilizar cualquiera similar.
El proposito del ejemplo es el siguiente: El mismo programa de prueba realizado con el IDE standard de Arduino y con el Atmel Studio 6. Veremos que si programamos en ANSI C directamente el mismo programa ocupara la cuarta parte de memoria o menos. Sigue leyendo

 A continuación escribiré el código de un programa ejemplo donde se aplica una forma sencilla de generar ondas cuadradas. Para este ejemplo se han utlizado las interrupciones por CTC (Clear Timer on Compare) del Timer0, Timer1 y Timer 2. Con el Timer 0 generamos una frecuencia de 1kHz, con el Timer1 generamos 0.5kHz y con el Timer3 4kHz.
A continuación escribiré el código de un programa ejemplo donde se aplica una forma sencilla de generar ondas cuadradas. Para este ejemplo se han utlizado las interrupciones por CTC (Clear Timer on Compare) del Timer0, Timer1 y Timer 2. Con el Timer 0 generamos una frecuencia de 1kHz, con el Timer1 generamos 0.5kHz y con el Timer3 4kHz.
El programa principal o loop no hace nada, todas las acciones estan realizadas dentro de las respectivas interrupciones. Cada interrupción da vuelta 1 pin en el cual se encuentra conectado un LED. Sigue leyendo

Arduino timer interrupts
Las interrupciones del timer hacen que el programa del bucle principal sea interrumpido a intervalos precisos de tiempo para realizar una tarea especifica. Una vez realizada esta tarea el procesador vuelve a hacer la tarea que habia interrumpido en el bucle principal. Sigue leyendo