















 La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info...
La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. Mas Info... Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Curso de programación Arduino,
características, usos y aplicaciones.
Ya que el objetivo principal de Arduino es interactuar con el mundo físico, se incluyen en este curso los conocimientos y recursos necesarios para actuar en el mundo real y recoger información de éste. Además, se impartirán nociones básicas de electrónica necesarias para...
Tutorial Arduino
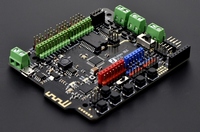 Romeo es un microcontrolador todo-en-uno diseñado especialmente para aplicaciones de robótica, 2 drivers para motores de 2A, puertos PWM, puertos I2C y mucho mas. Auna los beneficios de al plataforma Arduino miles de código fuente de ejemplo con licencias libres , se puede ampliar fácilmente con la mayoría de los Escudos Arduino. Integra control para dos motores DC y puerto para conexión inalámbrica que proporciona una forma mucho más fácil para comenzar su proyecto de robótica. Sigue leyendo
Romeo es un microcontrolador todo-en-uno diseñado especialmente para aplicaciones de robótica, 2 drivers para motores de 2A, puertos PWM, puertos I2C y mucho mas. Auna los beneficios de al plataforma Arduino miles de código fuente de ejemplo con licencias libres , se puede ampliar fácilmente con la mayoría de los Escudos Arduino. Integra control para dos motores DC y puerto para conexión inalámbrica que proporciona una forma mucho más fácil para comenzar su proyecto de robótica. Sigue leyendo
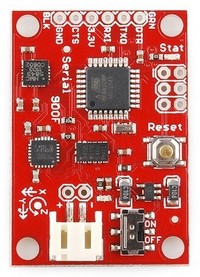 El sistema de medición inercial 9DOF Razor IMU dispone de 3 sensores de alta calidad- un giroscópio de tres ejes ITG3200 , un acelerómetro ADXL345 de 3 ejes, y un compás/magnetómetro HMC5883L de 3 ejes. El conjunto proporciona 9 grados para medición inercial. Todas las salidas de los sensores son procesadas por un ATmega328 que envía a su vez la información por su puerto série UART para poder recuperarlos de forma limpia.
El sistema de medición inercial 9DOF Razor IMU dispone de 3 sensores de alta calidad- un giroscópio de tres ejes ITG3200 , un acelerómetro ADXL345 de 3 ejes, y un compás/magnetómetro HMC5883L de 3 ejes. El conjunto proporciona 9 grados para medición inercial. Todas las salidas de los sensores son procesadas por un ATmega328 que envía a su vez la información por su puerto série UART para poder recuperarlos de forma limpia.
Gracias al trabajo de Jordi Muñoz y otro, puede ser utilizado como un sistema AHRS para veículos autónomos.
La placa viene programada y probada con el bootloader de Arduino (8MHz) con un firmware de ejemplo que envía los datos de los sensores por l puerto UART y así ver su funcionamiento.
Puede conectarse un conversor Série/USB de 3,3V (disponible opcionalmente, ver productos relacionados) directamente a su salida. La velocidad de transmisión de datos está fijada en 38400 bps y el programa de prueba mostrará un menu de usuario para pruebas mediante cualquier terminal (Hyperterminal, minicom, etc) Sigue leyendo
 Para mucha gente, Arduino ha sido el punto de partida en el mundo de la electrónica embebida, lo cual es genial, porque el desarrollo con microcontroladores nunca debería ser una odisea. Todo lo contrario, ¡debería ser un placer! Pero según vamos ganando experiencia y nuestros proyectos se vuelven más y más ambiciosos, llega un momento en el que empezamos a vernos limitados. ¡Lo siento, querido Arduino, hemos pasado muy buenos momentos juntos! Pero, ¿y ahora qué? Bien, podríamos montar el microcontrolador en una protoboard, claro que sí, pero no sería tan raro vernos envueltos en un jaleo monumental: los pins ya no están numerados, el espacio en la placa de prototipos se ve reducido, y tendremos que tener cuidado añadiendo componentes en semejante jungla de cables. Un momento, tenemos la solución: la letra “T” y un poco de electrónica… señoras y caballeros, ¡presentamos la T-Board! Sigue leyendo
Para mucha gente, Arduino ha sido el punto de partida en el mundo de la electrónica embebida, lo cual es genial, porque el desarrollo con microcontroladores nunca debería ser una odisea. Todo lo contrario, ¡debería ser un placer! Pero según vamos ganando experiencia y nuestros proyectos se vuelven más y más ambiciosos, llega un momento en el que empezamos a vernos limitados. ¡Lo siento, querido Arduino, hemos pasado muy buenos momentos juntos! Pero, ¿y ahora qué? Bien, podríamos montar el microcontrolador en una protoboard, claro que sí, pero no sería tan raro vernos envueltos en un jaleo monumental: los pins ya no están numerados, el espacio en la placa de prototipos se ve reducido, y tendremos que tener cuidado añadiendo componentes en semejante jungla de cables. Un momento, tenemos la solución: la letra “T” y un poco de electrónica… señoras y caballeros, ¡presentamos la T-Board! Sigue leyendo
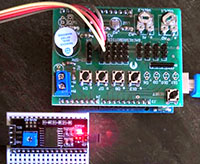 A veces cuando estamos armando un proyecto, puede ser que nos quedemos cortos con los pines de la placa Arduino y necesitemos optimizar las conexiones de hardware de nuestro diseño. En este articulo vamos a ver como podemos obtener unos pines más pasando de emplear un diaplay lcd conectado en modo paralelo (el cual emplea 6 pines) a un display lcd que utiliza el protocolo de comunicación I2C (empleamos 2 pines analógicos en el caso de la placa Arduino Uno, los pines digitales 2 y 3 para la placa Leonardo y los pines los 20 y 21 digitales en el caso de la Arduino Mega). Yo me he comprado un adaptador bastante económico que podemos soldadar a los pines de nuestra pantalla lcd, aunque también se venden los módulos y pantalla juntos. Aqui les dejo unas unas fotos para que puedan ver el módulo (hay muchos en el mercado pero que funcionan exactamente igual de bien): Sigue leyendo
A veces cuando estamos armando un proyecto, puede ser que nos quedemos cortos con los pines de la placa Arduino y necesitemos optimizar las conexiones de hardware de nuestro diseño. En este articulo vamos a ver como podemos obtener unos pines más pasando de emplear un diaplay lcd conectado en modo paralelo (el cual emplea 6 pines) a un display lcd que utiliza el protocolo de comunicación I2C (empleamos 2 pines analógicos en el caso de la placa Arduino Uno, los pines digitales 2 y 3 para la placa Leonardo y los pines los 20 y 21 digitales en el caso de la Arduino Mega). Yo me he comprado un adaptador bastante económico que podemos soldadar a los pines de nuestra pantalla lcd, aunque también se venden los módulos y pantalla juntos. Aqui les dejo unas unas fotos para que puedan ver el módulo (hay muchos en el mercado pero que funcionan exactamente igual de bien): Sigue leyendo

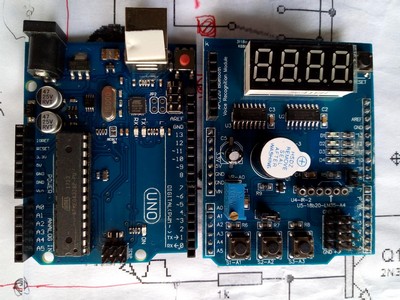
La tarjeta entrenadora Arduino (ArduKit) es una placa de bajo costo que se conecta directamente con los controladores Arduino UNO o Arduino Mega2560. Gracias a sus sencillos periféricos y variedad de conectores se convierte en el complemento ideal para realizar los primeros programas y proyectos basados en la plataforma ARDUINO, apta para todos los públicos.
Opcionalmente a esta tarjeta se le puede conectar un motor DC de bajo consumo (menos de 40mA), el cual se conecta a las salidas (PWM) D3 y D5. Con ellas se puede controlar velocidad y sentido de giro. A esas mismas salidas también se les puede conectar, opcionalmente otros elementos. Sigue leyendo
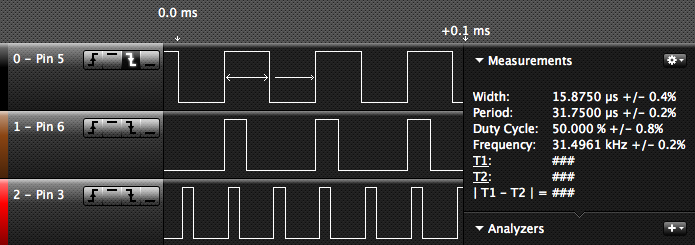 Ejemplo del uso de 3 timers + sus correspondientes interrupciones para crear un “reloj del sistema” que comprueba en cada interrupción si ha llegado el momento de realizar una tarea.
Ejemplo del uso de 3 timers + sus correspondientes interrupciones para crear un “reloj del sistema” que comprueba en cada interrupción si ha llegado el momento de realizar una tarea.
En este ejemplo tenemos 4 leds parpadeantes a diferentes frecuencias. Primero tenemos que definir una base de tiempo: elegir los Timers y configurarlos para que salte la interrupción correspondiente en el tiempo prefijado. Sigue leyendo